モビリティ向け 3D仮想化技術
3D仮想化技術とは?
3Dモデルを利用した仮想空間で様々な環境や条件をシミュレーションすることができます。
ゲームエンジン(Unreal Engine 4 / Unity)を活用した3D仮想空間を用いることで現実では再現の難しい環境やイベントをシミュレーション可能です。

ヴィッツの提供する仮想化技術の特徴
ヴィッツの保有する技術を基に、お客様の理想の環境を完全カスタマイズで構築します。
パッケージじゃないからこそできる柔軟でフィット性の高い環境を構築。
お客様が既に持っているシミュレーション環境の改造や、他の開発ツールとの連成を含めてエンジニアリングが可能
-
デリバリー性・カスタマイズ性
保有資産を活用しつつ基本はお客様の要望にあわせて唯一製品を受託開発
パッケージ製品では実現できない柔軟な環境構築が強み -
接続性
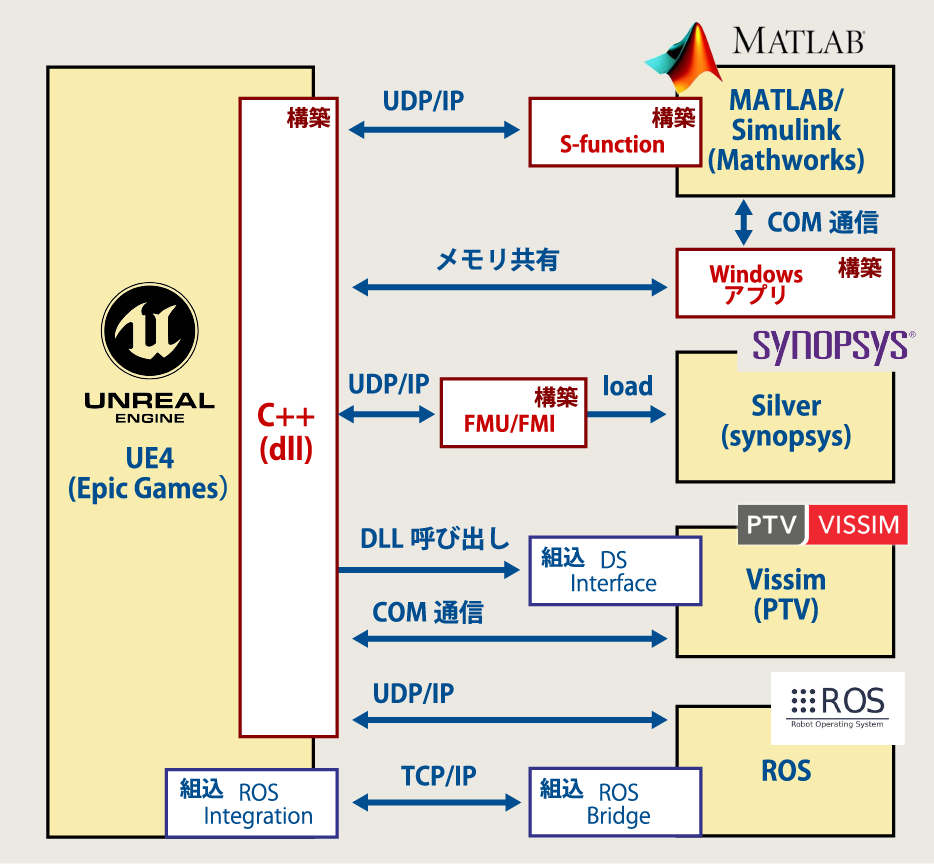
車載ソフトや開発ツールのノウハウを多く持つため、シミュレーションを車載ソフトや他ツールへ接続し仮想のシステムを構築することが得意
-
コストメリット
密にお客様と要求を議論し、必要な機能、必要なクオリティを見定めた上で構築するためリーズナブル

開発事例・保有技術紹介
1.環境モデル
お客様の要求に合わせてエンジニアリングさせていただきます。
※環境モデルの変更時には、エンジニアリングと実行体の再生成が必要
※実行体の再生成を必要としないので、動的に環境モデルを変更し、シミュレーションをTry&Errorで実行できるメリットあり
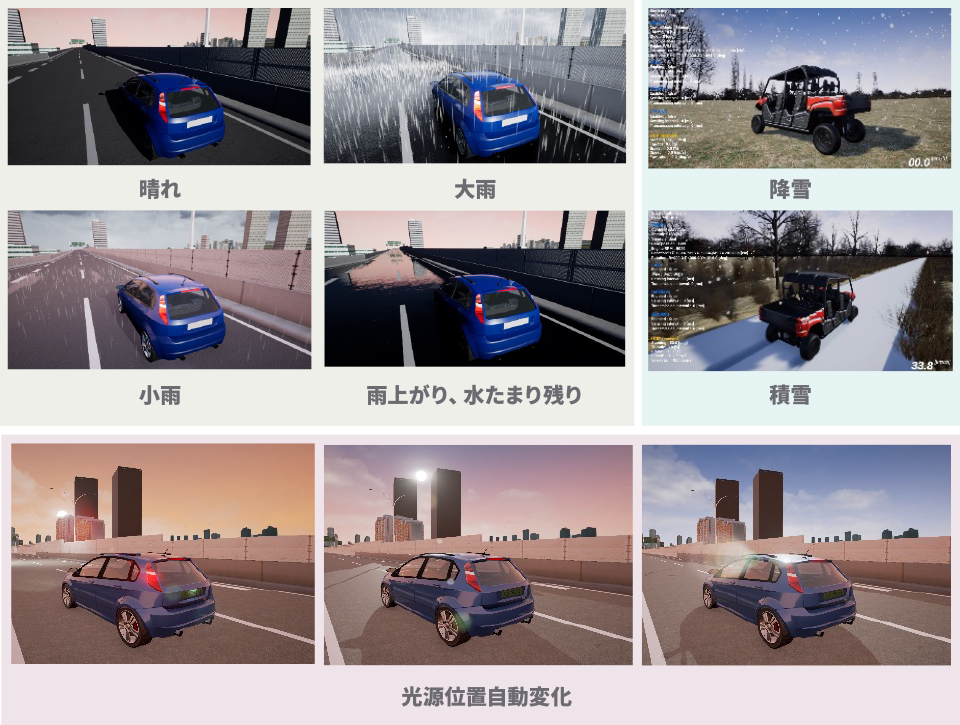
ロケーションモデリング
実在ロケーション

仮想ロケーション

気象条件、光源位置モデリング
2.車両モデル
顧客の要求に合わせてエンジニアリングさせていただきます。
| 車両モデル外観 | 車両モデルは弊社所有モデルまたは既製品のモデルを利用し環境構築を行う。 指定のモデルがある場合は、図面から精巧に作成することも可能。 |
|---|
| 車両制御 |
|
|---|
| 車両挙動 |
|
|---|
3Dオブジェクトモデリング
車両、人、建物の3Dモデル、道路や街全体のモデリングの他、実際の製品や建造物の製作前の事前検討用の3Dモデルや、製品のプロモーション用の高品位3Dモデル等、様々な用途での3Dモデルの構築を承ります。

3.センサモデル
多数のセンサモデルを保有し、お客様の要求に応じて設置個数や設置位置を調整できます。
センシング結果はシミュレーション外へ出力することができ、プロトコルやデータアサインについてもお客様環境へあわせてエンジニアリングが可能です。
| LiDAR/ミリ波 |
|
|---|
| GPS/ IMU |
|
|---|
| カメラ |
|
|---|
| サーモ |
|
|---|

【 活用実績 】

<概要>
- 車両挙動および各種センサ情報を模擬
- UDP等の通信を用いて自動運転コントローラ実機と接続可能
- 自動運転システムのロジック検証に活用
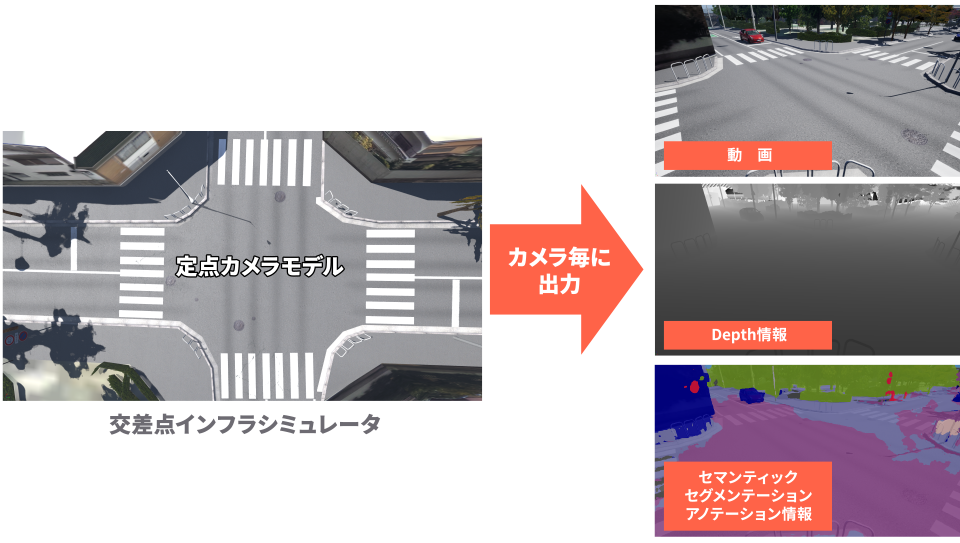
<概要>
- 交差点の4点に設置された定点カメラを模擬
- 車道、歩行をする人や自動車の挙動をシナリオ実行
- シナリオ実行時のカメラ視点の動画やDepth情報、アノテーション情報を出力
シミュレーション連成事例
ご相談・ご質問等ございましたら、
お気軽にお問い合わせください。