技術情報
TOPPERS Automotive Kernel
概要
ATK1(Automotive Kernel Version 1)は、弊社が名古屋大学情報科学研究科・組込みリアルタイムシステム研究室と共同で開発した自動車制御用リアルタイムOS(以降OSと記載)です。本OSは「OSEK/VDX仕様 Version2.2.1 ECC-2」に準拠したOSです。TOPPERSプロジェクトへ開発成果物としてコントリビュートし、オープンソースとして無償公開しています。ATK1の最新リリースはTOPPERSのWEBサイトからダウンロードできます。
特徴
○OSEK/VDX OS仕様 Version2.2.1準拠
標準化団体「OSEK/VDX」が策定した自動車制御用リアルタイムOSです。
自動車制御を目的として仕様策定されていますが、他の製品にも応用可能なコンパクトな仕様となっています。
○OSEK/VDX OIL仕様 Version2.5準拠のシステムジェネレータ(以降SGと記載)附属
本OSを利用する場合に必要なSGツールです。コマンド実行にて構成ファイル生成が可能で、任意の開発環境から実行可能となっています。
○OS共通部とターゲット依存部を分離
OS共通部からターゲット依存部を分離設計していますのでターゲット依存部の書き換えで容易に移植が可能となっています。
○MODISTARC検証済み
MODISTARCとはOSEK/VDX仕様に準拠していることを検査するために、OSEK/VDXが定めたOSテストプランです。
公開されているMODISTARCはOSEK/VDX Version2.0対応ですが、Version2.2.1への変更差分をテストプランに追加して、検証を実施しています。
○MISRA-C対応
欧州の自動車メーカを中心として定められたC言語設計規約「MISRA-C」チェックを実施しています。
実行速度を優先する箇所やコードサイズを節約するために、敢えてMISRAコーディング規約を逸脱している箇所はありますが、逸脱する箇所は個別に検討を行い、MISRAの指摘する危険コードの回避を行っています。
応用例
本技術と通信ミドルウェアを統合したソフトウェアプラットフォーム
ソフトウェア構成
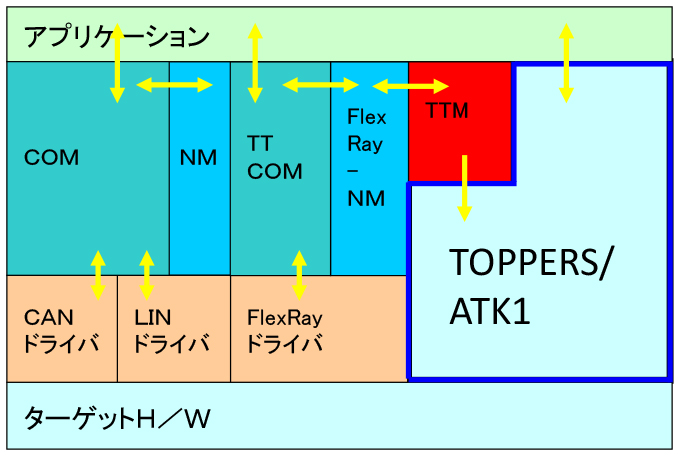
各コンポーネントの概要
COM(Communication):
OSEK/VDX Communication仕様 Version 3.0.3準拠の通信制御コンポーネント
NM(Network Management):
OSEK/VDX Network Management仕様 Version 2.5.3準拠の通信管理コンポーネント
CAN(Control Area Network)ドライバ:
COMおよびNMにてCAN通信を利用するためのデバイスドライバコンポーネント
LIN(Local Interconnect Network)ドライバ:
COMおよびNMにてLIN通信を利用するためのデバイスドライバコンポーネント
LINコンソーシアム仕様 Version 1.3準拠
※動作確認済みのCOM、NM、CANドライバ、LINドライバをパッケージ化したCAN/LIN通信ミドルウェアは、TOPPERSのWEBサイトからダウンロードできます。
※動作確認済みのTTM、TTCOM、FlexRay-NM、FlexRayドライバをパッケージ化したFlexRay通信ミドルウェアは、TOPPERSのWEBサイト(会員向け早期リリース)からダウンロードできます
技術の製品情報
製品・サービスのOwls-Automotiveを参照ください。
ご相談・ご質問等ございましたら、
お気軽にお問い合わせください。
名古屋市中区栄三丁目3番21号セントライズ栄6階 TEL (052)220-1218 / FAX (052)218-5855