技術情報
モデルベース開発
モデルベース開発とは
モデルベース開発とは、シミュレーション技術を取り入れたシステム開発手法です。
「モデル」を用いて従来開発の各工程を改善し、品質や開発速度を向上することが可能です。
ここではソフトウェア開発に適用した場合を例に、モデルベース開発を説明します。
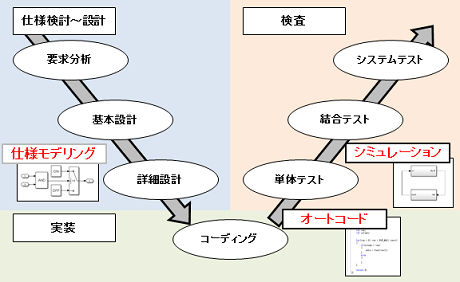
以下に、ソフトウェアの開発プロセスを「仕様検討~設計」「実装」「検査」の各工程おける、 モデルベース開発を適用した際のメリットを示します。
「仕様検討~設計」工程におけるメリット
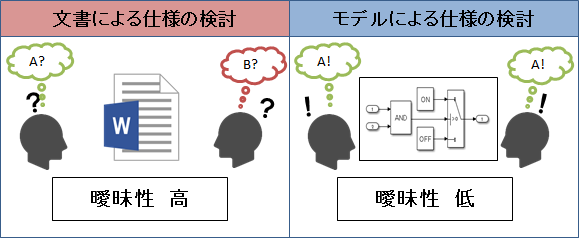
モデルベース開発では、モデルを用いて仕様を記述します。
モデルは数学的に表現されるため、自然言語による仕様記述と比べて曖昧性が低く、 読手の解釈による仕様の誤解を防ぐことが可能です。
また、作成したモデルは、シミュレーション可能な「実行可能仕様書」として利用可能です。
「実行可能仕様書」を用いれば、仕様検討の段階で仕様の確かさを確認することが可能です。
「実装」工程におけるメリット
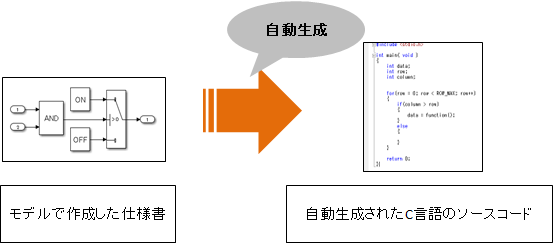
「仕様検討~設計」工程で作成したモデルを基に、C言語のソースコードを ツールによって自動的に生成することが可能です。
ソースコードを自動で生成するため、仕様の誤解やケアレスミスによる実装間違いを排除可能です。また、実装者のコーディングスキルに依存していた品質を一定にすることが可能です。
「検査」工程におけるメリット
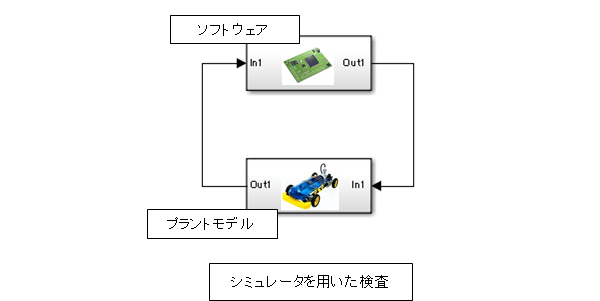
モデルベース開発では、ソフトウェアの検査に必要な様々な環境をモデル化することで、 実機を用いずに仮想環境上で検査を実施可能です。
従来開発でのボトルネックとなっている、実機の完成までソフトウェアの検査が不可能という 制約を受けないため、より早いタイミングで検査が可能です。これによって、開発期間の短縮/開発コストの削減が期待できます。
モデルベース開発で利用するシミュレーション環境
モデルベース開発を実施するためには、シミュレーション環境の構築が必須となります。
シミュレーション環境には様々な種類があるため、利用目的を明確にした上で、 適切なシミュレーション環境を構築する必要が有ります。
代表的なシミュレーション環境と、各環境が適用可能な開発工程を、 開発プロセスのV字モデルをベースに示します。
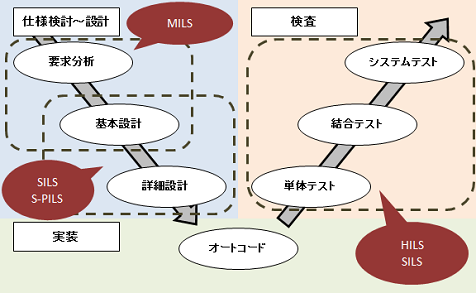
※各シミュレーション環境の適用工程は一例です。
※使い方次第ですが、他工程への適用も可能です。
MILS ( Model In the Loop Simulation )
MILSとは
MILSとは、モデルで記述した仕様書を、プラントモデルと結合して 動作させるシミュレーション環境です。
SILS ( Software In the Loop Simulation )
SILSとは
SILSとは、C言語等のソースコードからPCで実行可能なオブジェクトコードを作成し、 プラントモデルと結合して動作させるシミュレーション環境です。
制御ロジックの検証に非常に強く、ソフトウェアの動作確認に利用可能です。 また、PC上の統合開発環境でステップ実行が利用できることも強みです。
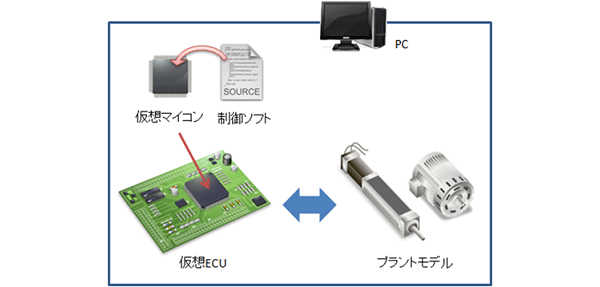
S-PILS ( Simulated Processor In the Loop Simulation )
S-PILSとは
S-PILSとは、対象のプロセッサのモデル(仮想マイコン)を使用してソフトウェアの検証を行うシミュレーション環境です。
制御ソフトウェアやOS、ドライバなどの基盤ソフトウェアは実物を使用し、周辺プラントを含めた環境をすべてPC上でシミュレーションすることが可能です。
活用例
仮想ECU内の素子にショート、オープンなど故障注入し、 マイコンモデルへの伝達、制御ソフトウェアの動作を検証可能です。
S-PILSのメリット
実機用のオブジェクトコードを使用して動作の検証が可能です。 また、マイコンと周辺回路の電気故障をシミュレーションできるので、 実機より容易に検証が可能です。
HILS ( Hardware In the Loop Simulation )
HILSとは
HILSとは、シミュレーションモデルと実物(ハードウェア)を使用したシミュレーションであり、 電気信号レベルの検証が可能です。車載用ECU開発に適用した場合の構成例を、下図に示します。
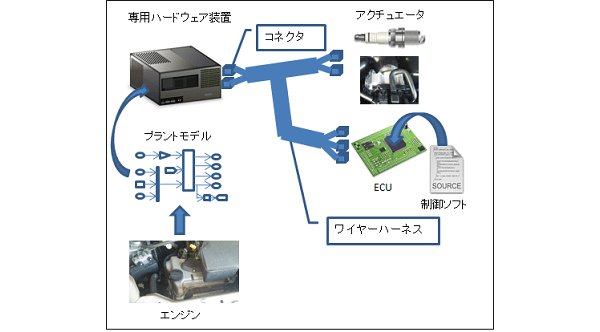
自動車の場合は、エンジン、トランスミッションなどを模擬したプラントモデルを専用のハードウェア装置で実行し、ECUに搭載した制御ソフトウェアの動作を検証しています。
HILSのメリット
実際のECUやアクチュエータを使用するため、実車に近い状態でのシミュレーションを安全に行うことが可能です。
具体例を以下に示します。
- 実車では難しい高速域、高温域での検証
- 実際の不具合波形を入力することによる不具合の再現
- 実際には発生させるのが難しいECUの電気故障の検証
プラントモデル
エンジンやモータなどの制御対象をプラントといい、これらを仮想化したものをプラントモデルと呼びます。
プラントモデルは、主にプラント(とその周辺設備)を用意することが困難な場合の代替として使用されます。
プラントモデルの種類としては、物理モデルと統計モデルの大きく二つにわけられます。
物理モデル
対象の挙動を運動方程式に置き換えたものであり、 運動方程式の詳細度を上げることで、より実際に近い動作を再現可能です。
統計モデル
あらかじめ入力に対応した出力値をもつブラックボックスであり、 物理モデルと比較して処理負荷を抑えることが可能です。
実際のプラントは様々な特性を持っているため、 その特性を全て再現しようとした場合、演算リソースの確保や、作成期間など、 膨大な構築コストがかかることになります。
そのため、プラントモデルを作成する時は 注目するシミュレーション内容に応じて、プラントから必要な現象を抽出し、 詳細度を決めることが重要となります。
受託業務実績
HILS構築
- エンジン制御用 HILS構築
- トランスミッション制御用 HILS構築
- ボディ系制御用 HILS構築
- 車両全体模擬するHILS構築
S-PILS構築
- パワースライドドア制御用 S-PILS構築
- HV向けの複数ECUを対象としたS-PILS構築
- ブレーキシステム用 S-PILS構築
SILS構築
- トランスミッション制御用 SILS構築
- エンジン制御用 SILS構築
- HV制御用 SILS構築
モデル構築
- トランスミッションモデルの開発
- エンジンモデルの開発
- AT油圧系モデルの開発
- デュアルクラッチトランスミッション制御ロジックモデルの開発
ツール使用実績
Mathworks社製ツール
MATLAB / Simulink / Simulink Corder(Real Time Workshop) / StateFlow
SimScape(SimDriveline , SimElectronics , SimMechanics) / Simulink 3D Animation
Simulink Verification and Validation
モデリングツール
Dymola / AMESim / MapleSim / SaberRD / CarSim
シミュレータ(HILS)
dSPACE / CRAMAS / RT-LAB
シミュレータ(S-PILS)
VLAB / Virtualizer
モデルベース開発に関するお問い合わせはコチラから
ご相談・ご質問等ございましたら、
お気軽にお問い合わせください。
名古屋市中区栄三丁目3番21号セントライズ栄6階 TEL (052)220-1218 / FAX (052)218-5855